Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Источник: Ship Thrusting by the Bending Oscillations of parts of a hull surface ) Students: Belyaev V.А., Kuznetsov D.S. (7KS group) Scientific advisor: Chizhiumov S.D.
 Students: Belyaev V.А., Kuznetsov D.S. (7KS group) Scientific advisor")
2
In the series of experiments conducted in U.S.A., the sailfish swam 91 m for 3 s, which is equivalent to the speed of 109 km / h.

3
Statement of the problem Administrative contradiction Already two hundred years ago, it became clear that the oar both the paddle wheel are less efficient than the propulsion device of a fish. Copying their tail flipper, the engineers imperceptibly got a screw. Screw had been perfected and complicated, the theories for him was customized, but the screw ship still insufficiently effective, whereas its screw worse than created by nature. Improvement of the propeller - is not the solution, but only a constant reminder of the existence of "Gray's Paradox". But how can be copied the propulsion device of dolphins and fish, when still not entirely clear how it work? АRIZ* 1. Analytical stage * We used elements of ARIZ 85 (Altshuller G.S.)

4
System analysis of the problem F Development of traditional types of a propulsors (paddle wheel, screw, water-jet, fixed wing) reached the peak. Further improvement does not lead to significant improvements. Finishes the stage of their evolution. The next step should lead to a qualitative change. Law of transition to a super-system (higher-level system). Even reaching 100% of screw efficiency, the propulsion problem in principle is not solved because of the high resistance of a water to ship movement. Therefore, it is necessary to come on the system of a higher-level, considering not propulsions (trying to improve its efficiency) and not hull (trying to reduce the resistance to movement) but their joint working. Law of the transition to managed resources. The development of ships going in the direction of resources with higher levels of organization, such as a controlled substance and fields. While management is applied and improved in relation only to the work of propellers (variable-pitch propeller, azipod, ….). The poor attention is given to control of hydrodynamic forces on a ship surface. Law of increasing degree of system dynamic. For ships with conventional propulsors the dynamic is seen only at motion of working surfaces (blades) of propulsors. Flow around entire ship hull is stationary. Therefore, it is necessary to create the non-steady flow around ship surface.
 reached the peak. Further improvement does not lead to significant improvements. Finishes the stage of their evolution. The")
5
Statement of the Problem Ideal End Result Resistance force of the ship is equal to zero, thrust propulsion is maximum of possible (Efficiency = 100%).
.")
6
Marine propulsors include fast-moving, relative to the speed of the ship, working surfaces. The working surfaces of propeller creates a large difference of a speed potential (=> speed and pressure), which reduces the effectiveness of their working (large eddy losses, cavitation). If to reduce the speed of the working surfaces, for formation of the same thrust it will required to increase their area, that will cause increasing of friction drag. Statement of the Problem Technical contradiction 1 The ends of the blades are moving at very high speeds, which leads to the stall of flow and the formation of cavitation. In addition there are other problems: large sizes and complexity of the drive (paddle wheels - a typical example), lack of strength.
, which reduces the effectiveness of their working (l")
7
Statement of the Problem Technical contradiction 2 At flow the thick elongated ship hull creates a system of fast-track pressure, which one on a majority of length is negative. As result the turbulent boundary layer is formed and friction drag considerably increases (in the nose the pressure is positive and the flow is laminar). If, however, to reduce the hull length, when significantly increases the resistance of the form (as a result of formation of stalls and large vortexes, and also because of a wake formation).

8
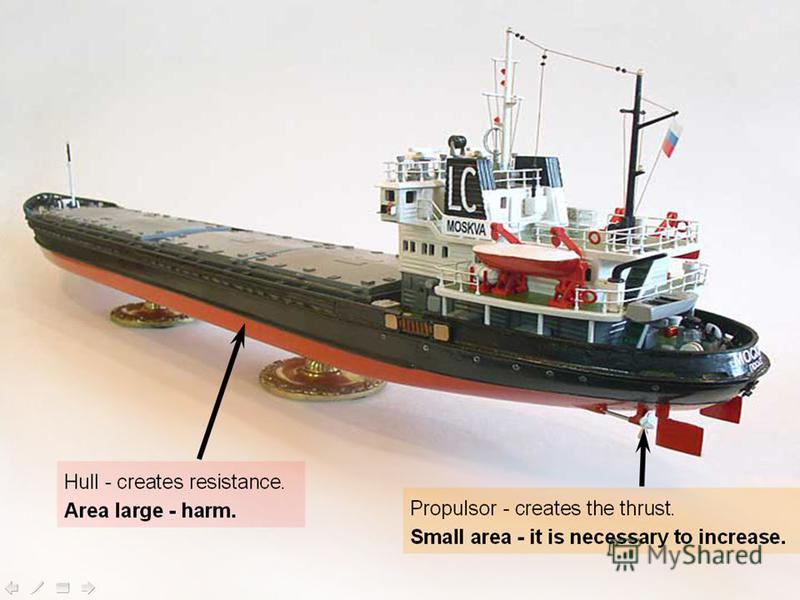
Statement of the problem Physical contradiction 1 Thrust is concentrated in the area of propulsor - almost at the point compared to the ship size. Since the water is not solid, effectively repelled from it by applying a concentrated load, it is difficult (cavitation, etc.). The area of bearing surfaces of a propulsor should be increased. But with their increase the vortexes occur and the frictional resistance grows. This resistance is added to the resistance of the hull. Thus, there should be a large bearing surface of the screw (for a thrust) there should be no surface of the propulsors (to eliminate the resistance).

9
Statement of the problem Physical contradiction 2 The ship hull of any form handicaps motion of the ship - it only creates resistance to motion. But it can not be excluded, because it determines the basic function of the ship (the placement and transportation of cargo or passengers). Thus, the hull must be it should not be (or rather, should not be the surface that creates resistance of friction and form) *. * We will not considered one of the known ways of this contradiction resolving (hovercraft, hydrofoil). We'll go by the other way - as we need to resolve conflict 1).

11
2. Operational stage After passing through several steps in ARIZ operational stage, which led to some already known solutions, we come to the next step. Check the possibility of changes in adjacent objects: removal of one object by transferring its functions to another object. Solution 1 (known) to remove ship hull out of the water by transmitting of his function (supporting above water) to underwater wings (hydrofoil) or to other elements (hovercraft,...). Solution 2 (proposed) to remove the traditional propulsors by transmitting of their function to hull: Thus, the hull must create thrust. Analogue in nature - fish. The following problem: how to create the thrust by surface of the hull?

12
There are miscellaneous theories of fishes moving:. fin theory; wave theory etc. The theories were created, but they not in complete agreement with practice. Thrust force may have a different nature: - - vortex (on the blades of a propeller); - - inertia; - - reactive; - - elastic. Most of the known propulsions - vortex or reactive. Fish and snakes in the water uses primarily inertial forces. Cross sections of their bodies produce controlled motion with variable acceleration, forming a bending vibrations. The forces of inertia, generated at it, are proportional to accelerations and mass. Mass includes the mass of ship hull and the added mass of water. Should be noted, then more area of surface experiencing lateral vibrations, than more added masses.
; - - ine")
13
Thus, for thrusting directly by ship hull, it should create bending oscillations of considerable amplitude. The optimal amplitudes, frequency and form of bending oscillations of a hull surface should be determined on the basis of a mathematical model. It is also necessary: to - to develop a models and control laws of the bending vibrations; to - to determine the materials for elastic hull; - to develop a mechanisms for vibrations excitation.

14
The idea to model fish movement is not new. There are several inventions in this field. However, their implementation meets with insurmountable obstacles, such as: large overloads, causing nausea, additional inertial loads from the pressure on the hull structures, the lack of manufacturing techniques of various materials required. Model of the submarine with a wave propulsion

15
The ship hull should make bending oscillations of considerable amplitude, but should not create a large overloads, which bad for the passengers and crew, and also should not create inertia pressures of cargo onto a hull structures. New contradiction Applying some of the 40 standard techniques for resolving of technical contradictions, we obtain the following possible solutions: - to reduce the length of the bending waves; - to produce the bending not of all ship hull, but only of its plating or some grillages; - - to divide the hull onto two different functional parts (in one part of the ship – cargo and passengers, the other(s) create the thrust).

16
It is proposed to use the elastic bottom for propulsion of the ship. Field of application of such propulsor in the near future first of all can become a small boats (specially inflatable boats, with a elastic hull). The first possible variant of the system:
. The first possible variant of the")
17
The second possible variant of the system: The bending of underwater hulls working in phase opposition, provides stabilization of a upper hull. The motion is automatically controlled by an intellectual system. Racks Horizontal wings capable by stretching and compressing to call a bending of underwater floppy hulls

18
Thank you for your attention

Еще похожие презентации в нашем архиве:

. Centrifugal force (from Latin centrum center and fugere to flee) can generally be any force directed.")




 is the physical theory of measurement in an inertial.")






 is an electrical circuit consisting of a resistor, an inductor, and a capacitor, connected in series or in.")


: Every body continues in its state of rest or of uniform speed in a straight line unless it is compelled.")



