Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Centrifugal force (rotating reference frame)
")
2
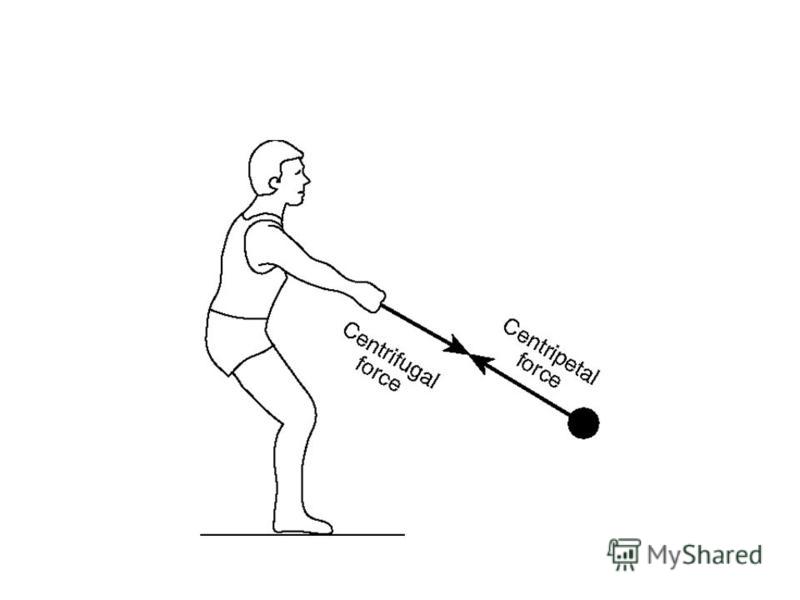
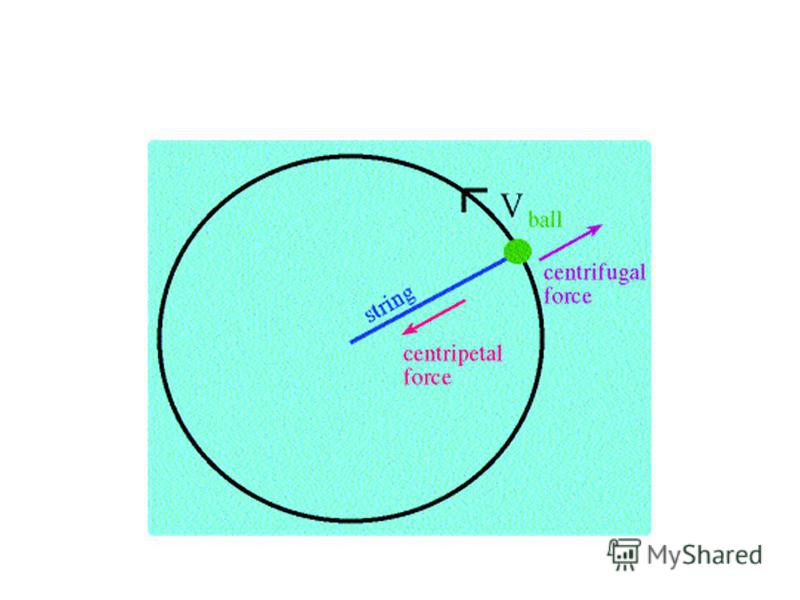
Centrifugal force (from Latin centrum "center" and fugere "to flee") can generally be any force directed outward relative to some origin. More particularly, in classical mechanics, the centrifugal force is an outward force which arises when describing the motion of objects in a rotating reference frame. Because a rotating frame is an example of a non-inertial reference frame, Newton's laws of motion do not accurately describe the dynamics within the rotating frame. However, a rotating frame can be treated as if it were an inertial frame so that Newton's laws can be used if so-called fictitious forces (also known as inertial or pseudo- forces) are included in the sum of external forces on an object. The centrifugal force is what is usually thought of as the cause for apparent outward movement like that of passengers in a vehicle turning a corner, of the weights in a centrifugal governor, and of particles in a centrifuge. From the standpoint of an observer in an inertial frame, the effects can be explained as results of inertia without invoking the centrifugal force. Centrifugal force should not be confused with centripetal force or the reactive centrifugal force, both of which are real forces independent of the frame of the observer.

3
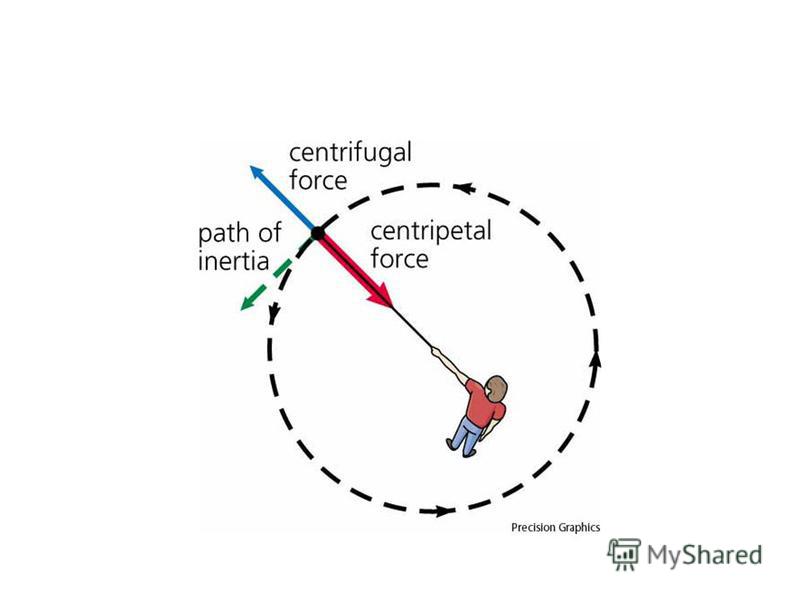
Analysis of motion within rotating frames can be greatly simplified by the use of the fictitious forces. By starting with an inertial frame, where Newton's laws of motion hold, and keeping track of how the time derivatives of a position vector change when transforming to a rotating reference frame, the various fictitious forces and their forms can be identified. Rotating frames and fictitious forces can often reduce the description of motion in two dimensions to a simpler description in one dimension (corresponding to a co-rotating frame). In this approach, circular motion in an inertial frame, which only requires the presence of a centripetal force, becomes the balance between the real centripetal force and the frame-determined centrifugal force in the rotating frame where the object appears stationary. If a rotating frame is chosen so that just the angular position of an object is held fixed, more complicated motion, such as elliptical and open orbits, appears because the centripetal and centrifugal forces will not balance. The general approach however is not limited to these co- rotating frames, but can be equally applied to objects at motion in any rotating frame.

Еще похожие презентации в нашем архиве:




 is the physical theory of measurement in an inertial.")



: Every body continues in its state of rest or of uniform speed in a straight line unless it is compelled.")
. Like a set, it contains members (also called elements, or terms),")

![Statistics Probability. Statistics is the study of the collection, organization, analysis, and interpretation of data.[1][2] It deals with all aspects.](/thumbs/17/1175940/big_thumb.jpg "Statistics Probability. Statistics is the study of the collection, organization, analysis, and interpretation of data.[1][2] It deals with all aspects.")

![Asteroid Asteroids (from Greek στεροειδής - asteroeidēs, star- like,[1] from στήρ star and εδος like, in form) are a class of small Solar System.](/thumbs/17/1152925/big_thumb.jpg "Asteroid Asteroids (from Greek στεροειδής - asteroeidēs, star- like,[1] from στήρ star and εδος like, in form) are a class of small Solar System.")

 is an electrical circuit consisting of a resistor, an inductor, and a capacitor, connected in series or in.")
 order does not matter.")

 such that the function.")


 objects.")

