Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Построение инвариантных множеств рациональных преобразований

2
Множество Жюлиа функции f: C C J(f) = {z C: f n (z), при n }
 = {z C: f n (z), при n }")
3
Наполненное множество Жюлиа K(f) = {z C: f n (z), при n }
 = {z C: f n (z), при n }")
4
Множество Жюлиа функции f c (z) = z 2 + c Свойство: Множество Жюлиа (J = J(f c )) – отталкивающее по отношению к f с И, наоборот, множество J – притягивающее по отношению к обратной функции f c –1 (z) =(z – c)
 = z 2 + c Свойство: Множество Жюлиа (J = J(f c )) – отталкивающее по отношению к f с И, наоборот, множество J – притягивающее по отношению к обратной функции f c –1 (z) =(z – c)")
5
Множество Жюлиа функции f c (z) = z 2 + c Два типа (в зависимости от параметра с) связные несвязные
 = z 2 + c Два типа (в зависимости от параметра с) связные несвязные")
6
Множество Мандельброта Служит индикатором для двух типов множеств Жюлиа. Каждая точка в множестве Мандельброта представляет значение c, для которого множество Жюлиа J(f c ) связно. Каждая точка из дополнения к множеству Мандельброта представляет значение c, для которого J(f c ) несвязно
 связно. Каждая точка из дополнения к множеству Мандельброта представляет знач")
7
Множество Мандельброта M = {c C: {f c n (0)}n=0, 1, 2,… ограничена} (теорема Фату) M = {c C: f c n (0), при n }
}n=0, 1, 2,… ограничена} (теорема Фату) M = {c C: f c n (0), при n }")
8
z n+1 = f c (z n ) Зафиксируем c. Все такие точки z 0, что последовательность {z n } ограничена, образуют наполненное множество Жюлиа K(f c ) Зафиксируем z 0 = 0. Все такие точки c, что последовательность {z n } ограничена, образуют множество Мандельброта M
 Зафиксируем c. Все такие точки z 0, что последовательность {z n } ограничена, образуют наполненное множество Жюлиа K(f c ) Зафиксируем z 0 = 0. Все такие точки c, что последовательность {z n } ограничена, образуют множество Мандель")
9
Алгоритм проверки ограниченности последовательности {f c n (z 0 )} Выбираются достаточно большие m и R Для j = 1, …, m проверяется неравенство |f c j (z 0 )| > R z C j N z = z 0 for j = 1 to m do z = z 2 + c // z = f c j (z 0 ) if |z| > R then return неограниченная_последовательность return ограниченная_последовательность
} Выбираются достаточно большие m и R Для j = 1, …, m проверяется неравенство |f c j (z 0 )| > R z C j N z = z 0 for j = 1 to m do z = z 2 + c // z = f c j (z 0 ) if |z| > R then return")
10
Метод обратных итераций Алгоритм построения множества Жюлиа J(f c ) Выбирается произвольная начальная точка. После нескольких итераций обратной функции f c –1 (z) =(z – c) точка становится очень близкой к множеству J Каждая последующая итерация точки выводится на экран
 Выбирается произвольная начальная точка. После нескольких итераций обратной функции f c –1 (z) =(z – c) точка становится очень близкой к множеству J Каждая последующая итерация точки")
11
Кватернионы (гиперкомплексные числа) q = r + ai + bj + ck, где i, j, k – мнимые единицы со следующими свойствами: i 2 = j 2 = k 2 = –1, ij = k, jk = i, ki = j, ji = –k, kj = –i, ik = –j; r, a, b, c – вещественные
 q = r + ai + bj + ck, где i, j, k – мнимые единицы со следующими свойствами: i 2 = j 2 = k 2 = –1, ij = k, jk = i, ki = j, ji = –k, kj = –i, ik = –j; r, a, b, c – вещественные")
12
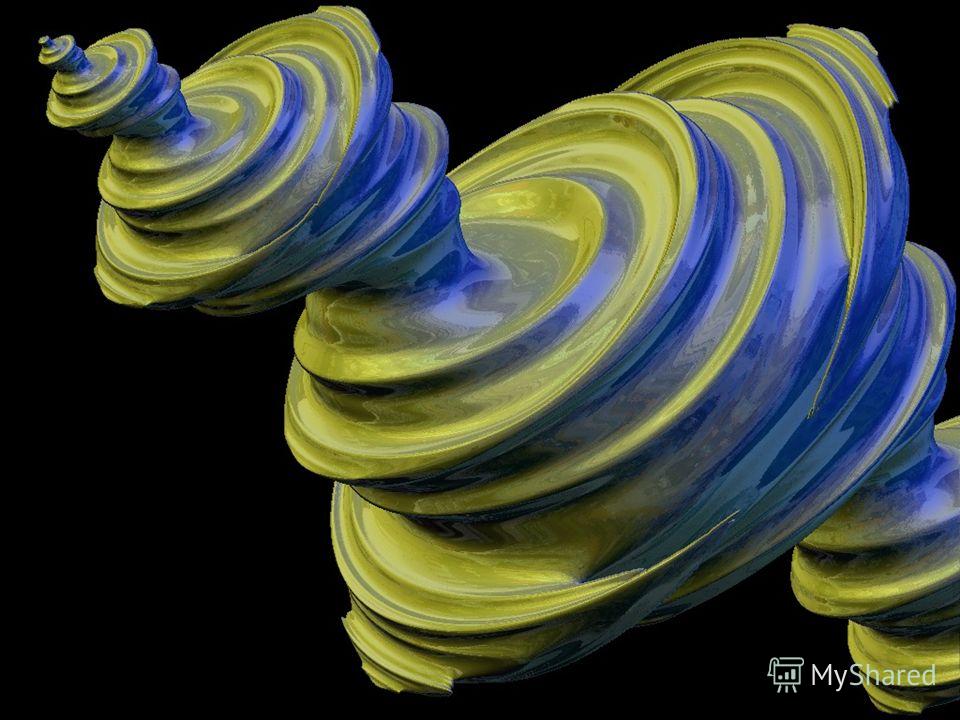
Гиперкомплексные множества Жюлиа и Мандельброта f: H H (например, f(h) = f с (h) = h 2 + с) K(f) = { h H: |f n (h)| ограничен, если n } M = {q H: 0 K(f с ), где f с (h) = h 2 + с}
 = f с (h) = h 2 + с) K(f) = { h H: |f n (h)| ограничен, если n } M = {q H: 0 K(f с ), где f с (h) = h 2 + с}")
15
Метод трассировки лучей Луч задается начальной точкой q 0 H вне множества направлением dir H, |dir| = 1 Точка h на луче, находящаяся на расстоянии dist от начала луча, определяется по следующей формуле: h = q0 + dirdist

16
Первый способ нахождения расстояния от начала луча до точки пересечения Дополнительно задаются: максимальное расстояние maxD, дальше которого пересечение не ищется количество разбиений n Определяется шаг по расстоянию D = maxD / n

17
Недостатки данного способа нахождения пересечения С возрастанием точности (количества разбиений n) пропорционально возрастает время поиска пересечения Даже если луч пересекает K(f c ) (или M), и расстояние от начала луча до точки пересечения меньше maxD, пересечение может быть не найдено Может быть найдено не первое пересечение
 пропорционально возрастает время поиска пересечения Даже если луч пересекает K(f c ) (или M), и расстояние от начала луча до точки пересечения меньше m")
18
Второй способ нахождения расстояния от начала луча до точки пересечения Алгоритм: Выбирается точка q = q 0 Вычисляется dMin = dmin(q) и dMax = dmax(q) q = q + dirdMin Если |dMax-dMin| < ε, то точка пересечения q найдена. Выход. Если |q 0 – q| > maxD, то пересечения нет. Выход. Переход к 2. Расстояние от начала луча до точки пересечения dist = |q0 – q|. Существуют функции dmin и dmax, которые для каждой точки q выдают минимальную и максимальную оценку расстояния от q до множества. Задана погрешность ε
 и dMax = dmax(q) q = q + dirdMin Если |dMax-dMin| < ε, то точка пересечения q найдена. Выход. Если |q 0 – q| > maxD,")
19
Переход от 4D к 2D, вычисление матрицы расстояний Задаются следующие параметры: center, xDir, yDir, zDir H, minDist, maxDist, dx, dy R

20
Вычисление матрицы расстояний Для элемента (n, m) матрицы вычислим q 0 = center + dx(n / xRes – 0.5) xDir + dy(m / yRes – 0.5) yDir + minDistzDir Для луча с началом q 0 и направлением zDir найдем расстояние dist nm от q 0 до точки пересечения с множеством (примем maxD = maxDist – minDist) dm[n, m] = dist nm + minDist
 матрицы вычислим q 0 = center + dx(n / xRes – 0.5) xDir + dy(m / yRes – 0.5) yDir + minDistzDir Для луча с началом q 0 и направлением zDir найдем расстояние dist nm от q 0 до точки пересечения с множе")
21
Вычисление нормалей Получение изображения Для каждого элемента (n, m) матрицы dm, кроме граничных, координаты нормали (x, y, z): x = (dm[n + 1, m] – dm[n – 1, m]) / x, y = (dm[n, m + 1] – dm[n, m – 1]) / y, z = 2, где x = dx / xRes, y = dy / yRes. После этого вектор (x, y, z) нужно нормировать Получили 3-х мерные нормали (normal nm ) в подпространстве, натянутом на векторы xDir, yDir, zDir Яркость в точке (n, m): brightness = lightDirnormal nm, где lightDir – направление на источник света
![Вычисление нормалей Получение изображения Для каждого элемента (n, m) матрицы dm, кроме граничных, координаты нормали (x, y, z): x = (dm[n + 1, m] – dm[n – 1, m]) / x, y = (dm[n, m + 1] – dm[n, m – 1]) / y, z = 2, где x = dx / xRes, y = dy / yRes. По](http://images.myshared.ru/6/634316/slide_21.jpg "Вычисление нормалей Получение изображения Для каждого элемента (n, m) матрицы dm, кроме граничных, координаты нормали (x, y, z): x = (dm[n + 1, m] – dm[n – 1, m]) / x, y = (dm[n, m + 1] – dm[n, m – 1]) / y, z = 2, где x = dx / xRes, y = dy / yRes. По")
Еще похожие презентации в нашем архиве:




; Readln(a); S: =s+a; End;")

![Приближенные схемы Задачи упаковки. Задача oб упаковке Дано: n предметов и их размеры a 1,…,a n (0,1]. Найти упаковку всех предметов в единичные ящики,](/thumbs/5/357582/big_thumb.jpg "Приближенные схемы Задачи упаковки. Задача oб упаковке Дано: n предметов и их размеры a 1,…,a n (0,1]. Найти упаковку всех предметов в единичные ящики,")
 G и вершина s. Output: Множество R вершин, достижимых из s,")











![Урок 10. Сортировки 425 а1а2а3а4 Пример: Дан целочисленный массив А из 4-х элементов. 1 шаг. а1>a2? Да 3 b If a[1]>a[2] then begin b:=a[2]; a[2]:=a[1];](/thumbs/6/548869/big_thumb.jpg "Урок 10. Сортировки 425 а1а2а3а4 Пример: Дан целочисленный массив А из 4-х элементов. 1 шаг. а1>a2? Да 3 b If a[1]>a[2] then begin b:=a[2]; a[2]:=a[1];")


![M-чередующаяся декомпозиция Лекция 10. Нечетная декомпозиция Теорема 9.7 (Lovász [1972] ) Граф является фактор-критическим тогда и только тогда, когда.](/thumbs/6/674811/big_thumb.jpg "M-чередующаяся декомпозиция Лекция 10. Нечетная декомпозиция Теорема 9.7 (Lovász [1972] ) Граф является фактор-критическим тогда и только тогда, когда.")

