Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Mechatronics is as old as the history of modern engineering practice, But at the same time it is as new as few decades.

2
The word mechatronicswas introduced in Japan in 1969, spread through Europe in seventies and soon after commonly used in United States.

3
The development of mechatronics has gone through three stages: The first stage corresponds to the years around the introduction of word mechatronics. During this stage, technologies used in mechatronics systems developed rather independently of each other and individually. With start of eighties a synergic integration of different technologies started taking place. A notable example is opto-electronics, an integration of optics and electronics. The concept of hardware/software co-design also started in this year.

4
The third stage, which is considered as start of Mechatronics Age, starts with the early nineties. The most notable aspect of this stage are more and more integration of different engineering disciplines and increased use of computational intelligence in the mechatronics products and systems. Another important development in the third stage is the concept of micromechatronis, i.e., start of miniaturization the components such as microactuators and microsensors.

5
Mechatronics is therefore not a new branch of engineering, but a newly developed concept that underlines the necessity for integration and intensive interaction between different branches of engineering. The core disciplines of the mechatronics are undoubtedly set by the name, i.e, mechanics and electronics.

6
Definition Now we can give a more formal description for mechatronics: Mechatronics describes a multi-disciplinary engineering activity, which has been practiced for a number of years. It integrates the classical fields of mechanical engineering, electronics engineering and computer science/information technology at the design stage of a product or a system.

7
Mecha 'should be understood as the widest aspects of mechanical engineering, whilst'tronics'should be understood to embrace all aspects of microelectronics, electromechanics (modern electrical drives-motion control), control theory, computer science/engineering and information technology. A key factor in the mechatronics philosophy is the integration of microelectronics and information technology into mechanical systems, so as to obtain the best possible solution.
, control theory, computer science/")
8
Design of such products and processes, therefore, has to be the outcome of a multi-disciplinary activity rather than an interdisciplinary one. Hence mechatronics challenges the traditional engineering thinking, because the way it is operating, is crossing the boundaries between the traditional engineering disciplines.

9
DISPLACEMENT, AND POSITION SENSORS Displacement Measurement Measurement of displacement is the basis of measuring: Position Velocity Acceleration Stress Force Pressure Proximity Thickness

10
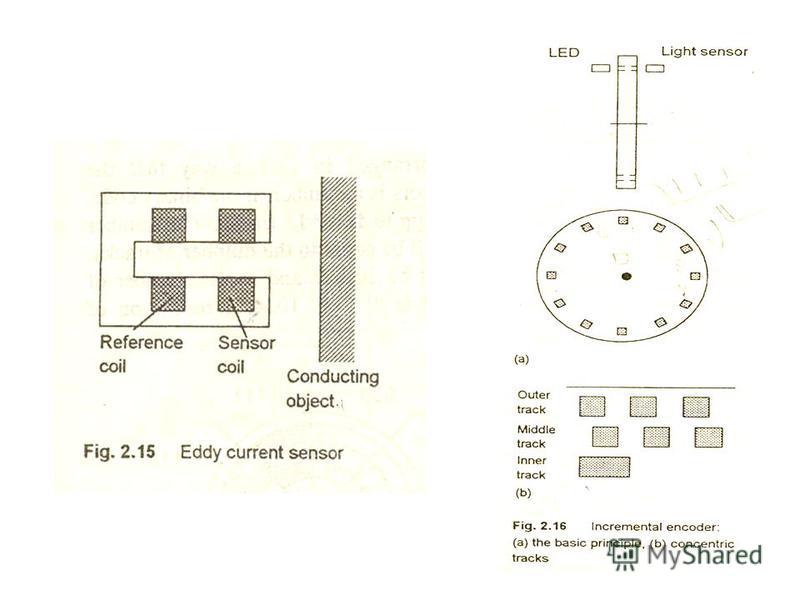
Displacement Sensors types Potentiometers displacement sensors Inductive displacement sensors Capacitive displacement sensors Eddy current displacement sensors Piezoelectric displacement sensors Ultrasonic displacement sensors Magnetostrictive displacement sensors Optical encoder displacement sensors Strain Gages displacement sensors

11
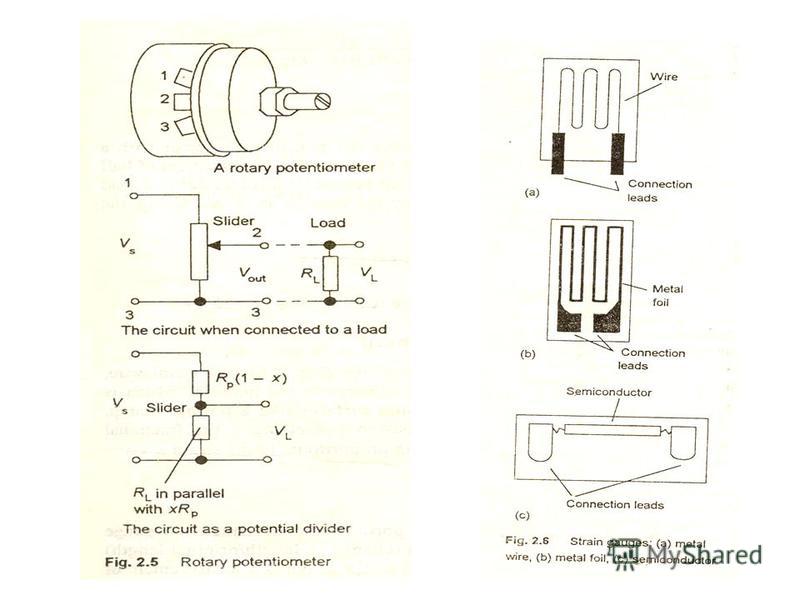
Resistive displacement sensors: An electrically conductive wiper that slides against a fixed resistive element. To measure displacement, a potentiometer is typically wired in a voltage divider configuration.

12
A known voltage is applied to the resistor ends. The contact is attached to the moving object of interest The output voltage at the contact is proportional to the displacement. Resistive displacement sensors

13
Potentiometer types : Turn counting dial potentiometer Linear motion Multi turn Potentiometer Resistive displacement sensors

14
Inductive displacement sensors The coil acts as a source of magnetomotive force that drives the flux through the magnetic circuit and the air gap. The presence of the air gap causes a large increase in circuit reluctance and a corresponding decrease in the flux. Hence, a small variation in the air gap results in a measurable change in inductance. Single-Coil Linear Variable-Reluctance Sensor

15
Inductive displacement sensors

16
Linear Variable Differential Transformer (LVDT) Motion of a magnetic core changes the mutual inductance of two secondary coils relative to a primary coil Primary coil voltage: V S sin(wt) Secondary coil induced emf: V1=k1sin(wt) and V2=k2sin( w t) k1 and k2 depend on the amount of coupling between the primary and the secondary coils, which is proportional to the position of the coil. When the coil is in the central position, k1=k2; V OUT =V1-V2=0 When the coil is is displaced x units, k1 not equal to k2 ; V OUT =(k1-k2)sin(wt) Positive or negative displacements are determined from the phase of V OUT.
 Motion of a magnetic core changes the mutual inductance of two secondary coils relative to a primary coil Primary coil voltage: V S sin(wt) Secondary coil induced emf: V1=k1sin(wt) and V2=k2sin( w t) k1")
17
Linear Variable Differential Transformer (LVDT)
")
48
UNIT-II

72
Unit-IV Programmable Logic Controllers

73
A PLC system: CPU module (left) and an I/O rack (right) (Allen Bradley PLC-5) (Courtesy of Allen-Bradley)
 and an I/O rack (right) (Allen Bradley PLC-5) (Courtesy of Allen-Bradley)")
74
A small PLC (Allen Bradley MicroLogix 1000) (Courtesy of Allen-Bradley).
 (Courtesy of Allen-Bradley).")
75
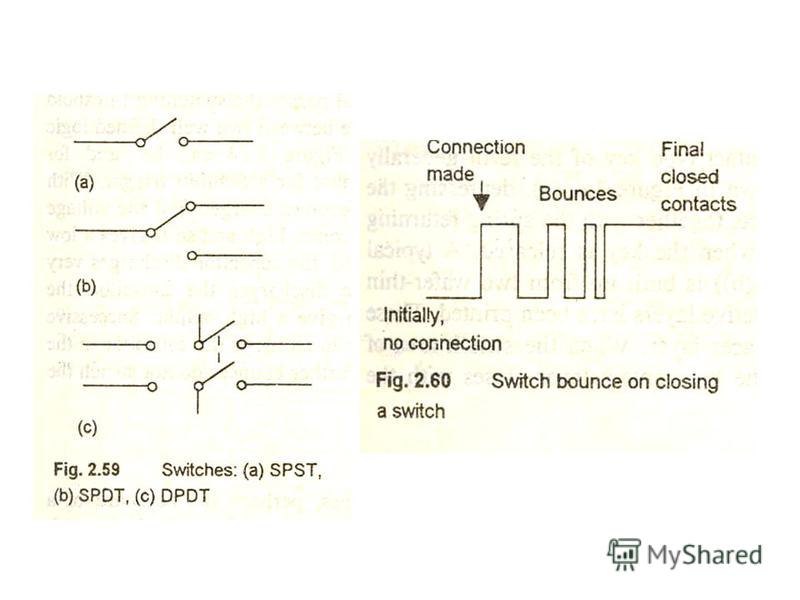
Types of switches

76
A Relay

77
A counter

78
Counter timing diagram (the count value is 5)
")
79
A timer

80
Timer timing diagram (the timing value is 5)
")
81
Ladder diagram for the circuit

82
Wiring diagram

83
Programmable logic controller system structure

84
I/O modules (Courtesy of Allen-Bradley)
")
85
Power input connections: (a) AC, (b) DC, and (c) TTL
 AC, (b) DC, and (c) TTL")
86
Power output connections: (a) AC, (b) DC, and (c) TTL
 AC, (b) DC, and (c) TTL")
87
Human interface terminal (Courtesy of Allen-Bradley)
")
88
PC-based programming software

89
Some relay diagram symbols

90
A ladder diagram

91
PLC wiring diagram

92
PLC scan

93
Basic logic

94
And logic

95
OR logic

96
Combine AND and OR logic

97
Example

98
Cell layout

99
Program

100
Wiring diagram

101
EXPLANATION OF THE PROGRAM Rung 1. If a part arrives and no part is stopped, trigger the barcode reader. Rung 2. If it is a right part, activate the stopper. Rung 3. If the stopper is up, the machine is not busy and the robot is not busy; load the part onto the machine. Rung 4. If the task is completed and the robot is not busy, unload the machine.

102
Data types

103
Operators

104
A up-counter functional block

Еще похожие презентации в нашем архиве:





























 is an electrical circuit consisting of a resistor, an inductor, and a capacitor, connected in series or in.")












 objects.")


. Centrifugal force (from Latin centrum center and fugere to flee) can generally be any force directed.")


